Se denomina planeta extrasolar o exoplaneta, a
un planeta que orbita una estrella diferente al Sol y que, por tanto, no
pertenece al Sistema Solar. Tales mundos se hallan a años luz de
distancia, por lo que ni siquiera nuestros instrumentos más avanzados logran
observar los detalles de su superficie. Lo máximo que pueden hacer nuestros
telescopios es detectar signos indirectos de su presencia en torno a una estrella y, a
partir de ellos, obtener algunos datos que permitan estimar su masa y el radio
de su órbita. En ciertos casos también nos proporcionan información sobre el
diámetro del planeta y otras características. En lo referente a los exoplanetas
gigantes, resulta posible inferir detalles sobre la composición y la dinámica
de su atmósfera.
 |
Es
posible deducir un gran número de detalles de un planeta lejano a partir de
unos pocos datos.
|
Ya que los planetas de gran tamaño son más fáciles de detectar que los pequeños, la mayoría de planetas extrasolares detectados son gigantes gaseosos igual o más masivos que el planeta Júpiter (hasta ocho veces más masivos), con órbitas muy cercanas a su estrella y periodos orbitales muy cortos, conocidos como Júpiteres calientes. En la mayoría de los casos, no resulta posible medir su radio, pero sí determinar su masa y el tamaño de su órbita. En algunos casos se conocen los radios (por ejemplo, los de dos planetas relativamente pequeños: GJ1214b y COROT-7b).
El observatorio espacial Kepler se diseñó para descubrir planetas a partir de la detección de pequeñas caídas en la luminosidad de la estrella. Si tales caídas se suceden en intervalos regulares, significa que hay un planeta que de manera periódica pasa por delante de su estrella. Se espera que Kepler descubra cientos de planetas, algunos de ellos tan pequeños como la Tierra. En comparación con la estrella anfitriona, un planeta supone una fuente luminosa muy débil. Por ello son muy pocos los planetas extrasolares que han sido observados de manera directa (identificados como un punto de luz ajeno a su estrella). En algunos casos se han detectado los colores de los planetas mezclados con los de la estrella anfitriona. Todos los demás planetas se han descubierto indirectamente, por regla general mediante la aplicación de las técnicas de vaivén y de los tránsitos.
Método del vaivén: la gravedad del planeta provoca que la estrella anfitrione gire levemente. Mediante el análisis del espectro de la luz estelar (efecto Doppler), se miden cambios en la velocidad de la estrella relativa a la Tierra en cantidades tan pequeñas como 1 m/s. Las variaciones periódicos revelan la presencia de un planeta.
Método del tránsito: si la órbita del planeta
cruza la línea de visión entre su estrella anfitriona y la Tierra, eclipsará en
cierta medida la luz recibida de la estrella. Un planeta del tamaño de Júpiter
eclipsa a su estrella en apenas un 1%. Un planeta del tamaño de la Tierra, en
un 0,01%.
En marzo de 2009, se lanzó
al espacio el telescopio espacial Kepler destinado a la búsqueda de planetas
fuera de nuestro sistema solar (exoplanetas). El método utilizado por Kepler
para detectar estos mundos distantes se basa en el método del tránsito explicado con anterioridad. El efecto de la disminución del brillo que es muy débil, es
suficiente para ser medido gracias a los avanzados instrumentos del
observatorio espacial Kepler. Solamente planetas que en su órbita crucen la
línea visual entre la estrella y la Tierra podrán ser detectados por este
método. Hasta el día de hoy, finales de marzo de 2016 Kepler ya ha confirmado
el descubrimiento de 1.041 exoplanetas. (Véase http://kepler.nasa.gov/).

En la figura de arriba se
representa un esquema del proceso, en el que se pueden distinguir tres zonas:
en la zona 1 el planeta no eclipsa a la estrella y la intensidad recibida es la
habitual de la estrella. La zona 2, llamada zona de “ingreso”, transcurre desde
que el planeta comienza a tapar la estrella hasta que todo el planeta queda por
delante de la estrella. En la zona 3 todo el planeta eclipsa a la estrella y
dura hasta que el planeta comienza a salir de la proyección del círculo de la
estrella. Todo el proceso en el que alguna parte del planeta eclipsa a la
estrella se le llama “tránsito”.
En la figura siguiente se representan los datos reales medidos para la estrella Kepler 22 y en la que se ha identificado por este método el planeta Kepler 22b. Con flechas rojas se indica los momentos en los que se produce un tránsito de dicho planeta.
A continuación se ha
hecho un zoom de la gráfica anterior. Consideramos que la órbita es
prácticamente circular y que el tránsito discurre por la zona media de la
estrella, es decir que recorre su diámetro máximo. En la curva de luz experimental la intensidad se ha representado normalizada al valor que
toma en la zona 1, es decir, la intensidad relativa es la intensidad recibida
en el detector del telescopio dividida por el valor que toma en la zona 1. En
este caso el tiempo de ingreso (ti) es demasiado pequeño y podemos
despreciarlo, es decir, todo el tránsito representado corresponde a la fase 3.
La
estrella y el planeta giran respecto del centro de masas común. Estudiando el
desplazamiento por efecto Doppler del espectro de la estrella se ha determinado
la velocidad radial de la estrella en función del tiempo, es decir la
componente de la velocidad de la estrella en la dirección de la visual con la
Tierra, Vr . Viene dada por la línea de puntos de la figura de abajo.
Por
métodos astrofísicos se ha estimado que la masa de la estrella Kepler 22 es 0,97
veces la masa del Sol y que su luminosidad es ligeramente inferior a la del Sol
LKepler22 = 0,7875 LSol. El telescopio espacial Kepler ha registrado una potencia por unidad de superficie de 7,0138 10-13 W/m2. Y un análisis espectral de la luz de la estrella ha permitido
determinar que su temperatura superficial es de 5.518 K.
Otros
datos que conocemos son: G = 6.67·10-11 [SI], radio del Sol =
6.95·105 Km, masa del Sol = 2·1030 Kg, radio de la Tierra
= 6.371 Km, masa de la Tierra = 5,97·1024 Kg.
Con toda esta información y a partir de la combinación del método de los tránsitos y de la velocidad radial podemos estimar lo siguiente:
a) Radio de la estrella
Kepler 22 y tipo de estrella que es. ¿Se encuentra en la secuencia principal?.
b) Periodo orbital,
velocidad orbital y distancia a la que gira de su estrella madre el exoplaneta Kepler-22b.
c) Radio del exoplaneta
Kepler-22b.
d) Demostrar que la pérdida
de intensidad relativa de la curva de luz del exoplaneta en su tránsito sobre la
estrella es Δ = ( RP/RS)2.
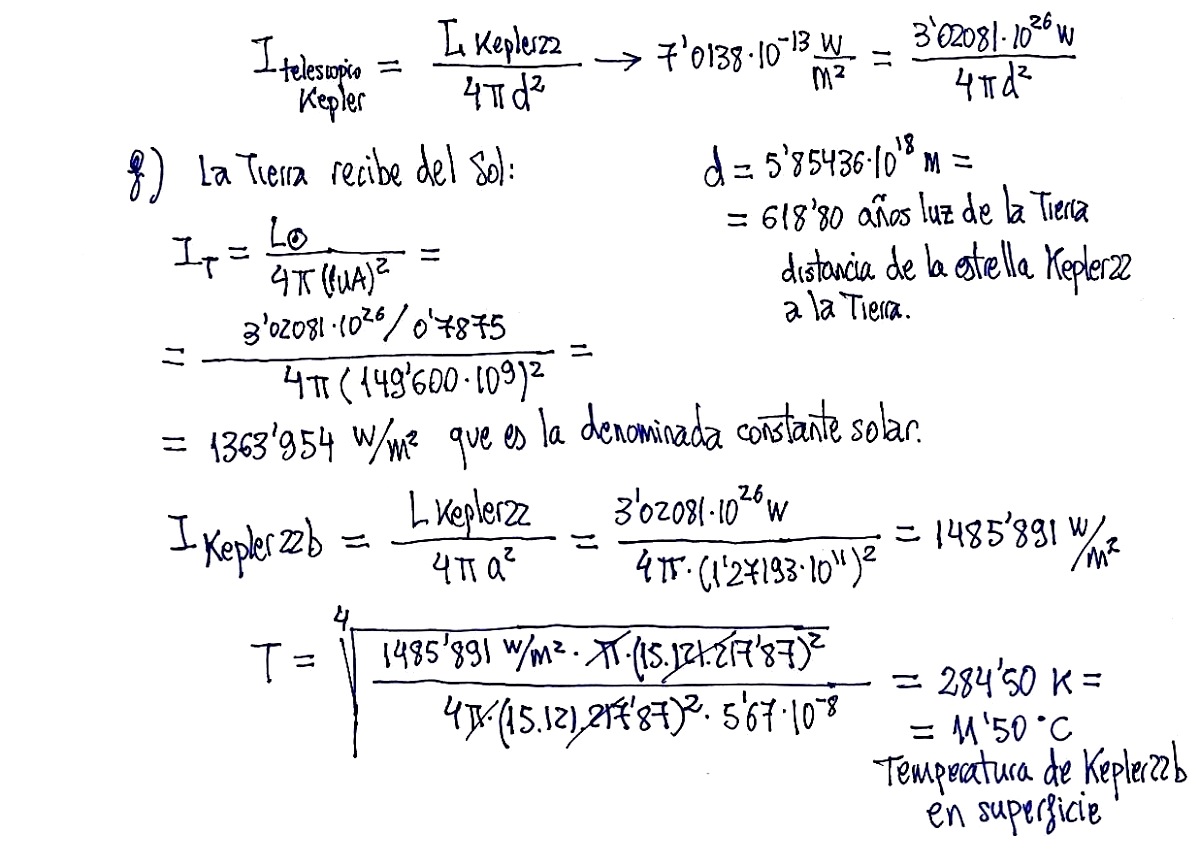
e) ¿A qué distancia en años
luz de nosotros, se encuentra la estrella Kepler 22?.
f) Luminosidad que recibe el
exoplaneta de su estrella. (Compararla con el valor de luminosidad que recibe
la Tierra del Sol). ¿Cuál será la temperatura sobre su superficie?.
g)
Velocidad de la estrella (Vs) Kepler 22 en su movimiento de rotación
respecto del centro de masas exoplaneta-estrella. ¿Qué puede significar que la
oscilación de la figura no tiene como valor medio el cero?.
h)
Densidad del exoplaneta Kepler-22b y aceleración de la gravedad en su superficie.
i)
¿Será habitable el exoplaneta?.
 |
| Exoplaneta Kepler 22b, representación artística. |























































{kind=link}